在过去的十年中,无人机(UAV)的研究引起了广泛的关注,涵盖了众多领域的应用,无人机作为未来技术的重要代表之一,正日益在农业、测绘、交通、救援等领域发挥着重要的作用。然而,由于无人机控制系统的复杂性和操作难度,普通用户往往需要经过漫长的培训才能驾驶无人机。为了实现稳定易用的控制方法,微美全息(NASDAQ:WIMI)提出了一种基于脑电图(EEG)的脑机接口(BCI)系统控制方法,用于低速无人机(UAV)的目标搜索。
据悉,微美全息(NASDAQ:WIMI)基于半自主导航和电机图像的无人机控制脑机接口系统该方法,主要包含两个子系统:决策子系统和半自主导航子系统。使得无人机能够在水平维度上进行连续控制,以实现低速无人机的稳定控制和目标搜索。
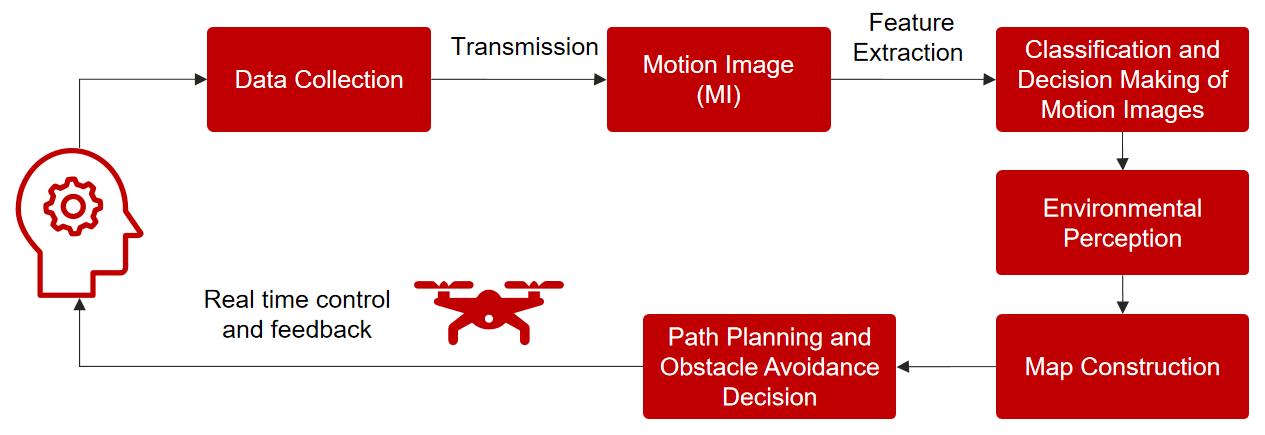
决策子系统,通过分析运动意象(MI)脑电图实现无人机的决策控制。采用改进的互相关法(CC)进行MI特征提取,该方法能够有效地提取脑电图中与运动意象相关的信息。然后,采用逻辑回归法(LR)对MI特征进行分类和决策,从而指导无人机的运动方向。该决策子系统为无人机提供了直接的脑控制能力,使得操作更加直观和高效。该方法的决策子系统的实现方式如下:
脑电图(EEG)信号采集:在决策子系统中,首先需要对操作人员的脑电图信号进行采集,通过非侵入式的脑电图设备,头戴式脑电图传感器或干式电极阵列来完成。脑电图记录大脑皮层的电活动,特别是与运动意象相关的电信号。
运动意象(MI)特征提取:在脑电图信号采集后,接下来是对运动意象(MI)特征进行提取。运动意象是指当一个人想象特定动作时,大脑产生的相应电信号。这些特定动作通常与无人机的运动方向有关,例如向左、向右、向前等。
特征分类与决策:在特征提取后,决策子系统使用分类算法来识别和区分不同的运动意象。通过分类算法包括逻辑回归(Logistic Regression)、支持向量机(Support Vector Machine)等。通过这些算法,决策子系统能够根据识别到的运动意象来判断操作人员的意图,并相应地指导无人机的运动。
传递指令给无人机:一旦决策子系统完成运动意象的分类决策,它会将相应的指令传递给无人机控制系统,指导无人机执行相应的动作。这些指令可以是飞行方向的调整、速度的变化或其他运动相关的控制。
决策子系统的关键是准确地识别和分类运动意象,从而将正确的指令传递给无人机。这需要对脑电信号进行有效的特征提取和高效的分类算法,以保证系统的稳定性和可靠性。
此外,半自主导航子系统是,WIMI微美全息基于半自主导航和电机图像的无人机控制脑机接口系统中的另一个关键组成部分。该子系统的主要目标是实现无人机的自主避障,确保决策子系统提供的运动方向是可行且安全的。它通过结合传感器数据和环境信息,使得无人机能够在未知或复杂的环境中具备一定的自主性和适应性。半自主导航子系统的实现方式如下:
传感器数据获取:在半自主导航子系统中,无人机配备多种传感器,如激光雷达、摄像头、超声波传感器等。这些传感器可以感知无人机周围的环境信息,包括障碍物的位置、距离、大小等。
环境感知与地图构建:通过传感器数据,半自主导航子系统对无人机周围的环境进行感知和分析。根据传感器数据,系统可以构建一个虚拟的环境地图,将障碍物的位置和其他重要信息标记在地图上。
路径规划与避障决策:基于环境地图,半自主导航子系统利用路径规划算法来确定无人机的飞行路径。在此过程中,系统会考虑无人机的当前位置、目标位置、环境中的障碍物分布等因素,以找到一条安全且高效的飞行路径。如果发现路径上存在障碍物,系统会通过避障决策算法来规避这些障碍物,保持无人机在安全的轨迹上飞行。
指令传递:一旦半自主导航子系统完成路径规划和避障决策,它会将相应的指令传递给无人机控制系统,指导无人机执行飞行动作。这些指令可以包括调整飞行方向、高度或速度,以确保无人机按照规划的路径飞行,并避开障碍物。
半自主导航子系统的设计旨在提高无人机的自主性,使得无人机在复杂和未知的环境中能够进行自主飞行,并在遇到障碍物时能够自动避让,保证飞行安全。相比完全自主导航系统,半自主导航系统在一定程度上仍依赖人工设定目标或区域,但通过脑机接口技术,可以让操作人员更灵活地指导无人机的运动,从而在应对复杂任务时具备更高的适应性和灵活性。
当然脑机接口技术仍处于不断发展和改进中,尽管取得了一定的进展,但在实际应用中仍面临一些挑战,如信号噪声、个体差异和系统响应速度等。因此,决策子系统的性能提升还需要不断的研究和创新。然而,随着技术的进步,基于脑电图的决策子系统有望成为未来无人机控制领域的一项重要技术,为无人机的智能化和自主化提供新的可能性。
显然,微美全息(NASDAQ:WIMI)基于半自主导航和电机图像的无人机控制脑机接口系统,是无人机技术领域的一大进步,它为无人机的操控带来了革命性的变革。该脑机接口系统的成功开发对于无人机技术的发展和普及具有重要意义,使得无人机操作更加简单、直观、高效。这一技术的应用将推动无人机产业的发展,为各个领域带来更多的便利和可能性。随着无人机应用场景的不断扩大,更加智能、简化的控制方式将助力无人机技术在农业、交通、救援、测绘等领域发挥更大的作用。



